- About Ajou
- Admission
- Academics
- Research
-
International
International
- Campus Life
-
News and Event
News and Event
-
AUT
AUT
Major Research Result
NEW A New Hydrogel Actuator for Insect-Sized Soft Robots
- 2023-07-27
- 1527
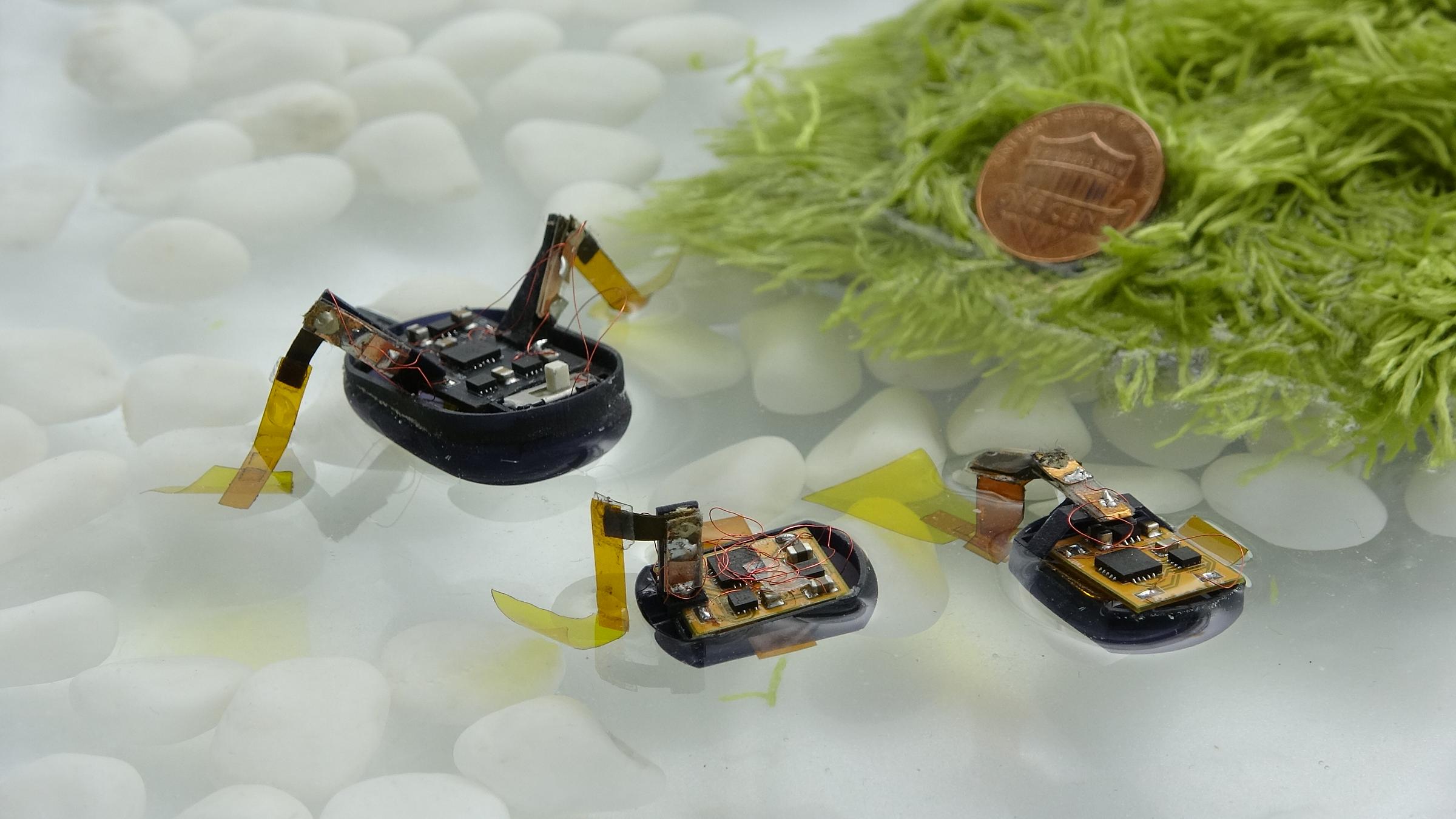
Researchers have developed a novel electroactive wrinkled nanomembrane electrode-based hydrogel actuator for untethered insect-sized aquabots
Hydrogel-based actuators for soft robots suffer from slow response speed and poor controllability. To address these limitations, a team of researchers from Korea has now developed a new wrinkled nanomembrane electrode-based hydrogel actuator with high energy efficiency and power density. This technology can be used for developing active medical devices and insect-scale aquabots that can be operated in humanly inaccessible environments.
A novel hydrogel actuator based on wrinkled nanomembrane electrodes can address the intrinsic limitations of hydrogel actuators, enabling the development of untethered soft robots and active medical devices.
Image courtesy: Ministry of Science and ICT, Korea
Despite the rapid advancements in microprocessors, energy storage, and electromechanical actuators, the fundamental drawbacks of conventional electric motors using bulky and rigid components have limited the development of insect-scale soft robots. To resolve these issues, research efforts have focused on hydrogel-based soft actuators which allow diverse chemical modifications and high mechanical deformation. However, these actuators suffer from slow response speed and poor controllability owing to technical challenges in producing electrodes on the hydrogels.
In a new study, a team of researchers from Korea, led jointly by Associate Professor Je-Sung Koh from the Department of Mechanical Engineering at Ajou University and Professor Jinhan Cho from the Department of Chemical and Biological Engineering at Korea University, has developed a new electroactive hydrogel actuator based on wrinkled nanomembrane electrodes (WNEs) driven by electroosmosis. In this process, an electric charge is applied to the hydrogel to speed up and regulate the movement of water inside it, thereby facilitating the controlled swelling of the hydrogel. Their study was published in the journal Science Robotics on 26 October 2022.
The hydrogel actuator was created using capillary-assisted in situ assembly of metal nanoparticles. This method resulted in the formation of a WNE layer on the hydrogel's surface, offering a large surface area and a porous structure. Importantly, it exhibited high electrical conductivity and mechanical deformability, enabling the hydrogel to stretch up to 110% of its original size.
These features enabled the WNE-coated hydrogel to exhibit outstanding actuation performance while operating at a voltages less than 3 V. It achieved a strain of over 50%, an energy density exceeding 700 kilojoules per cubic meter, and a power density surpassing 30 kilowatts per cubic meter. These remarkable characteristics allowed the researchers to develop an insect-scale autonomous aquabot with an onboard control unit and power source that occupied only 2% of its total mass. As a result, the robot achieved high locomotive speed and could move untethered independently.
Dr. Koh highlights the practical importance of their study: “Considering the low-power requirements and the ability to miniaturize soft actuators, this technology could find application in exploration robots that operate in diverse environments inaccessible to humans.”
Additionally, it has the potential to be utilized in active medical devices that can be attached to or implanted within the human body. “This technology can enable the development of soft autonomous robots and biomimetic insects. Furthermore, the fundamental technology of hydrogel electrode fabrication can easily transform functional hydrogels into electronic materials, and can thus be applied to various types of next-generation devices,” concludes an optimistic Dr. Koh.
Reference
Authors: | Jongkuk Ko1, Changhwan Kim2, Dongjin Kim2, Yongkwon Song1, Seokmin Lee1, Bongjun Yeom3, June Huh1,4, Seungyong Han2, Daeshik Kang2, Je-Sung Koh2,*, Jinhan Cho1,5,* |
Title of original paper: | High-performance electrified hydrogel actuators based on wrinkled nanomembrane electrodes for untethered insect-scale soft aquabots |
Journal: | Science Robotics |
DOI: | 10.1126/scirobotics.abo6463 |
Affiliations: | 1Department of Chemical and Biological Engineering, Korea University 2Department of Mechanical Engineering, Ajou University 3Department of Chemical Engineering, Hanyang University 4Department of Life Sciences, Korea University 5KU-KIST Graduate School of Converging Science and Technology, Korea University |
*Corresponding authors’ emails: jinhan71@korea.ac.kr (Jinhan Cho); jskoh@ajou.ac.kr (Je-Sung Koh)
About Ajou University
Founded in 1973, Ajou University has quickly grown to become one of the top universities in the Republic of Korea. With over 15,000 students and 50 research centers in diverse fields, Ajou University partakes in the largest national research and graduate education project funded by the Korean Ministry of Education. In line with its recently reformed vision, Ajou University’s goal is to change society by connecting minds and carrying out high-impact research to improve the welfare of people in and outside Korea.
Website: https://www.ajou.ac.kr/en/index.do
About the author
Je-Sung Koh is an Associate Professor at the Department of Mechanical Engineering at Ajou University in Korea. His research group is developing biologically-inspired robotic technologies. This includes abstracting principles from nature’s creatures and building robots using smart materials. His research interests encompass design and fabrication with smart materials, robots based on foldable structures, and soft robotics for enabling human-robot interaction.