新闻
NEW [16.11.08] 沈泰燮教授,开发出利用DNA信息驱动的超小型微机器人技术
- 2016-11-16
- 28930
我校沈泰燮教授(化学工程系,照片)参与的研究团队利用DNA研发出了可以如愿行动的微机器人。相关内容已刊载在国际学术刊物《自然·纳米技术(Nature Nanotechnology)》10月24日刊上。
以我校沈泰燮教授、梨花女子大学朴小静教授为代表的韩国研究团队和隶属美国宾夕法尼亚大学的李大延、约翰·克罗克教授团队共同利用人工DNA的碱基序列信息研发出了可以驱动软性材质微机器人的核心技术。沈泰燮教授以第一作者的身份参与了该研究。
软性材质微机器人指的是用像纳米粒子或高分子一样柔软的材料制作而成的机器人。这类机器人能在像体内血管一样的非常小且复杂的环境中活动,并在特定的电的信号和物理、化学的刺激下运转。然而微机器人却很难执行复杂的命令。研究团队利用DNA的碱基序列信息开发出可以巧妙控制行动的微机器人实数世界首例。
该研究团队关注了当DNA为单链时,以及结合后拥有双螺旋结构时DNA分子的长度。因为如果分子的长度发生变化,最终会发生物质增加或减少等的结构变化。该研究团队将通过操纵碱基序列信息制作出的DNA贴到金纳米粒子上,并通过DNA结合制作出DNA-金纳米粒子结构体。该结构因为拥有具备事先被操纵了的碱基序列信息的单链DNA,因此可以与具备完全符合该信息的碱基序列信息的DNA相结合,形成双螺旋结构。同时,研究团队还引入了具备两个完全不同碱基序列信息的DNA,并依靠这两个DNA,制作出可以控制按照所愿方向行动的微结构体。据此,停止或翻转等机器运作成为了可能。
沈泰燮教授表示,“与通过0和1的二进制数进行控制的电脑不同,此次通过具备A和T,G,C 4进制数信息的DNA控制驱动,由此可以发出更多样、更复杂的命令。”“今后,如果通过DNA的控制技术能够更快发展起来的话,可以开发出在像药物传递或血管扩张等复杂麻烦的情况下,也能够进行精密驱动的微机器人。”
此次研究是在未来创造科学部基础研究项目(个人研究)、美国国立科学财团(NSF)材料研究科学技术中心的支援下进行的。
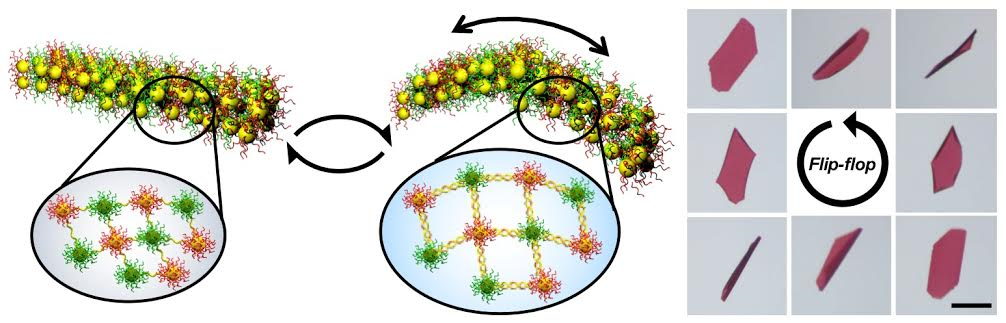
<依据DNA链交换反应的双层薄膜DNA-金纳米粒子结构体的驱动技术模式图(左)及依据链交换反应连续变形的双层薄膜结构体形态 (右)。根据 DNA双螺旋结构的结合和解体产生的力的不同,可以进行停止或翻转结构体等的机器操作。>
(注:本文中出现的所有人名均系音译)